Разработчик: Белова Е. В.
Целью работы являлось повышение точности определения координат положения в пространстве беспилотного аппарата за счет создания GSM-системы уточнения положения в пространстве.
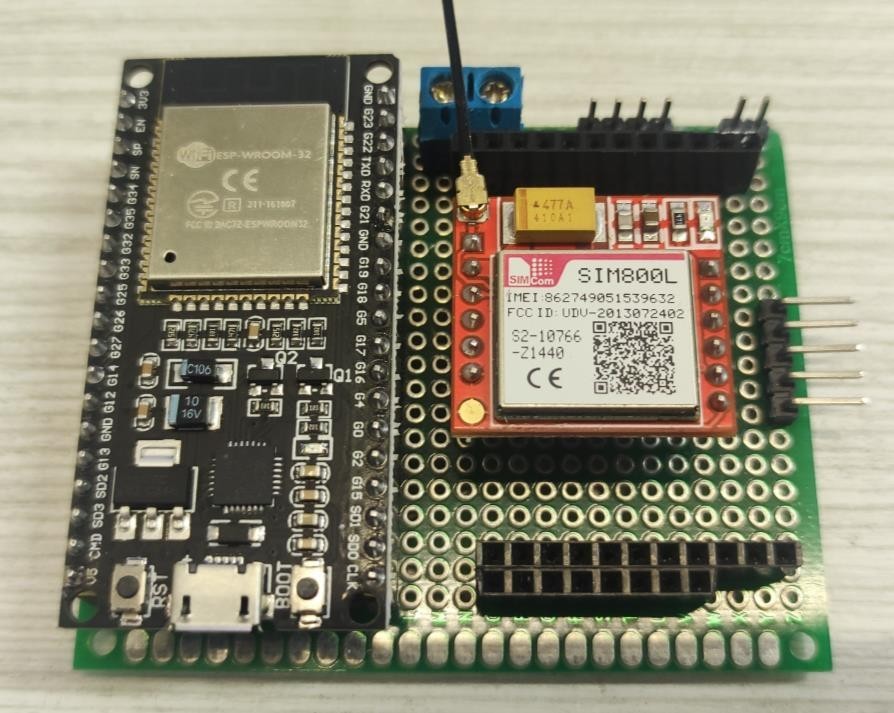
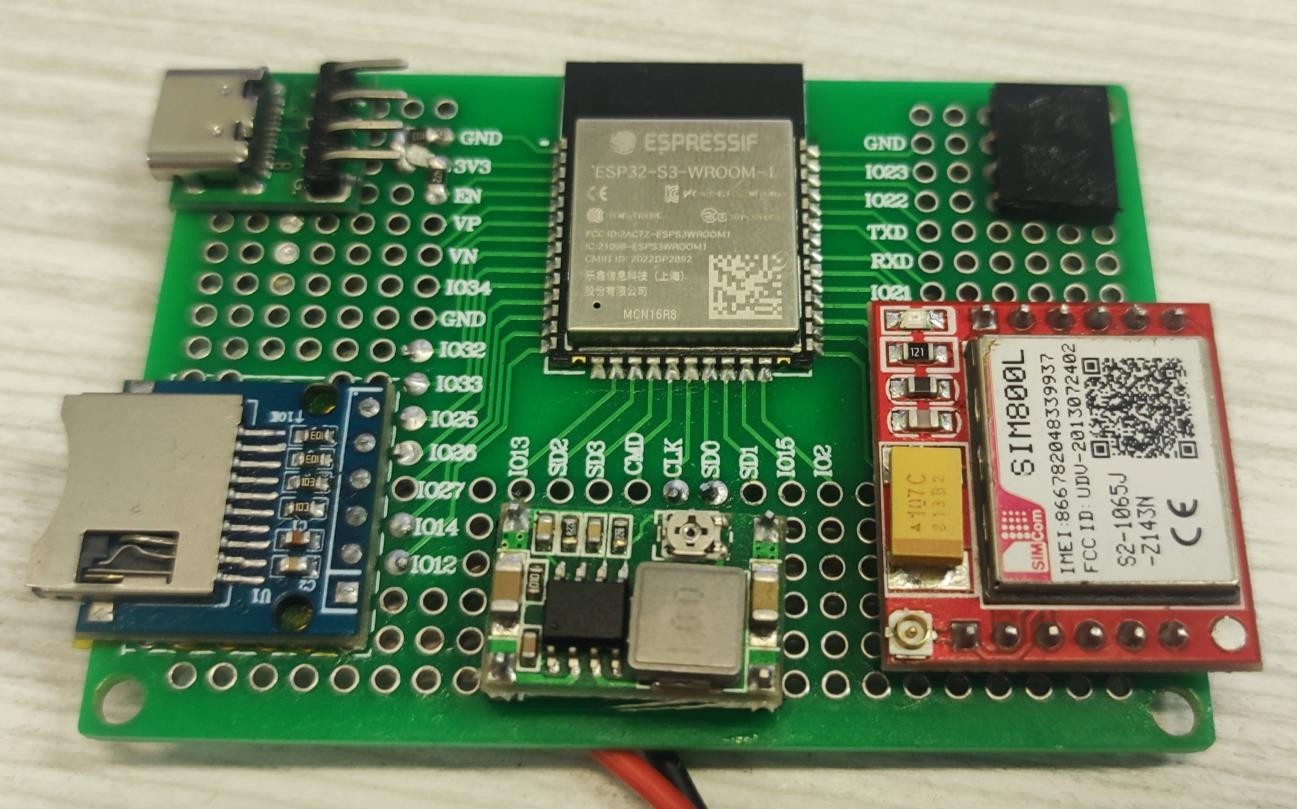
В процессе выполнения был проведен анализ работы различных модулей связи, изучена официальная документация, и выявлены несоответствия в описании работы модулей связи и реально получаемых ответах, подобраны необходимые для разработки программного обеспечения модуль связи и микроконтроллер, собрано несколько вариаций тестовых устройств на макетных платах на разных этапах разработки.
Были разработаны спецификации требований к проектируемой системе, спроектирована многоуровневая архитектура GSM-система уточнения положения беспилотного аппарата в пространстве, разработана структура хранения данных для журнализации координат вышек сотовой связи и уровня мощности сигнала, получаемого модулем связи.
На языке программирования C/C++ в операционной системе FreeRTOS было разработано программное обеспечение определения положения беспилотного аппарата в пространстве для микроконтроллера ESP32S3.
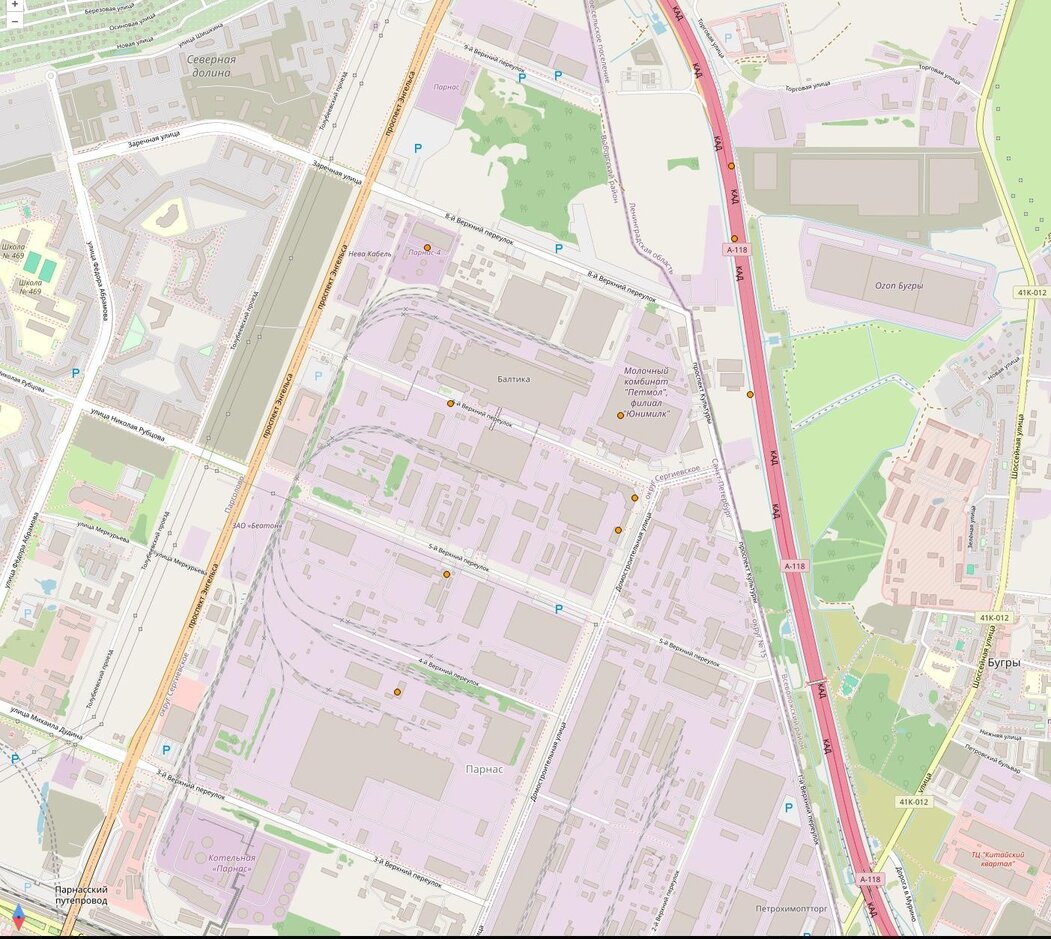
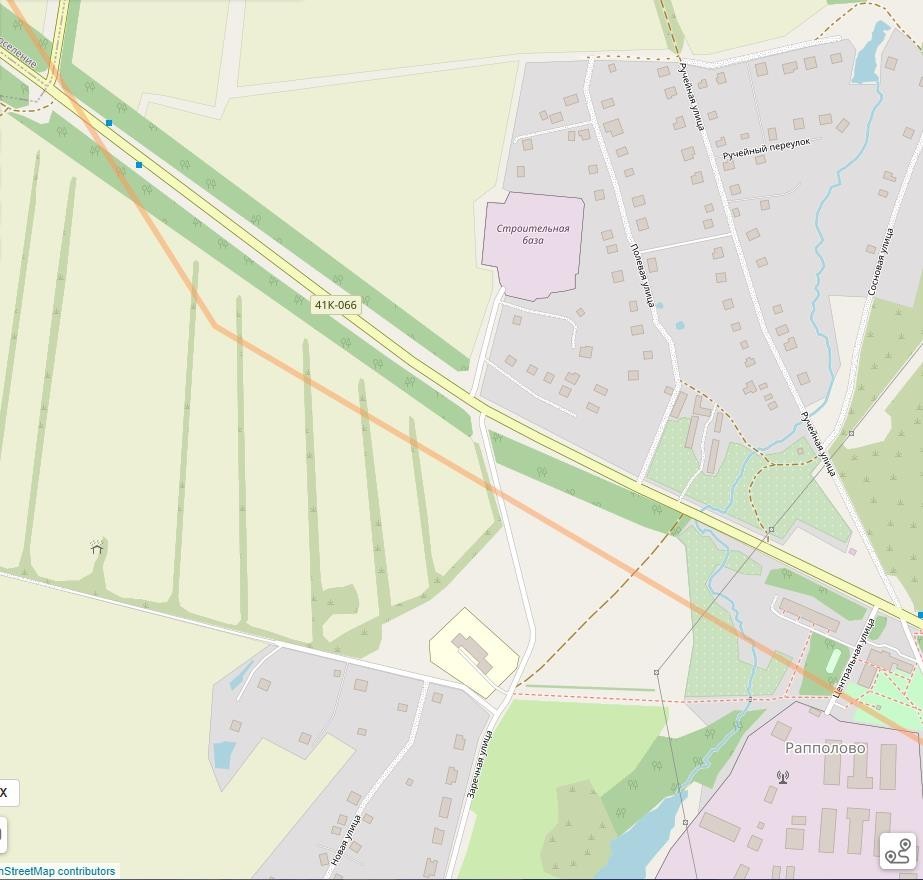
GSM-система уточнения местоположения беспилотного аппарата в пространстве в настоящее время проходит активное тестирование для сбора технических данных, данная система будет дорабатываться далее, в текущем виде, в зависимости от окружающей среды ее точность составляет от 1 до 100 метров, заданная цель точности – до 10 метров. Повышать точность далее планируется при помощи добавления в систему данных от инерциальной системы.