Разработчик: Гордиенко П.А.
Измерение углов наклона объектов относительно гравитационного поля Земли производится во многих научных и технологических сферах деятельности: от городского проектирования до нефтегазовой промышленности. Современные устройства, называемые инклинометрами, в случаях, когда объект имеет сложную структуру или представляет опасность для человека, не могут позволить произвести измерение углов бесконтактно с высокой точностью. Для решения этой проблемы было рассмотрено использование цифровой стереокамеры, которая получает данные о положении объекта в пространстве с помощью построения карты глубины его сцены. Данные, полученные таким образом, также могут быть легко интерпретированы для использования в разных задачах: построение трехмерной модели местности, ее анализ, компьютерная графика и так далее.
Целью проекта является разработка программного алгоритма расчета углов наклона реального объекта (плоскости) относительно абсолютных координатных осей X и Y, используя получаемые со стереокамеры данные карты глубины и положения камеры.
Программное и аппаратное обеспечение:
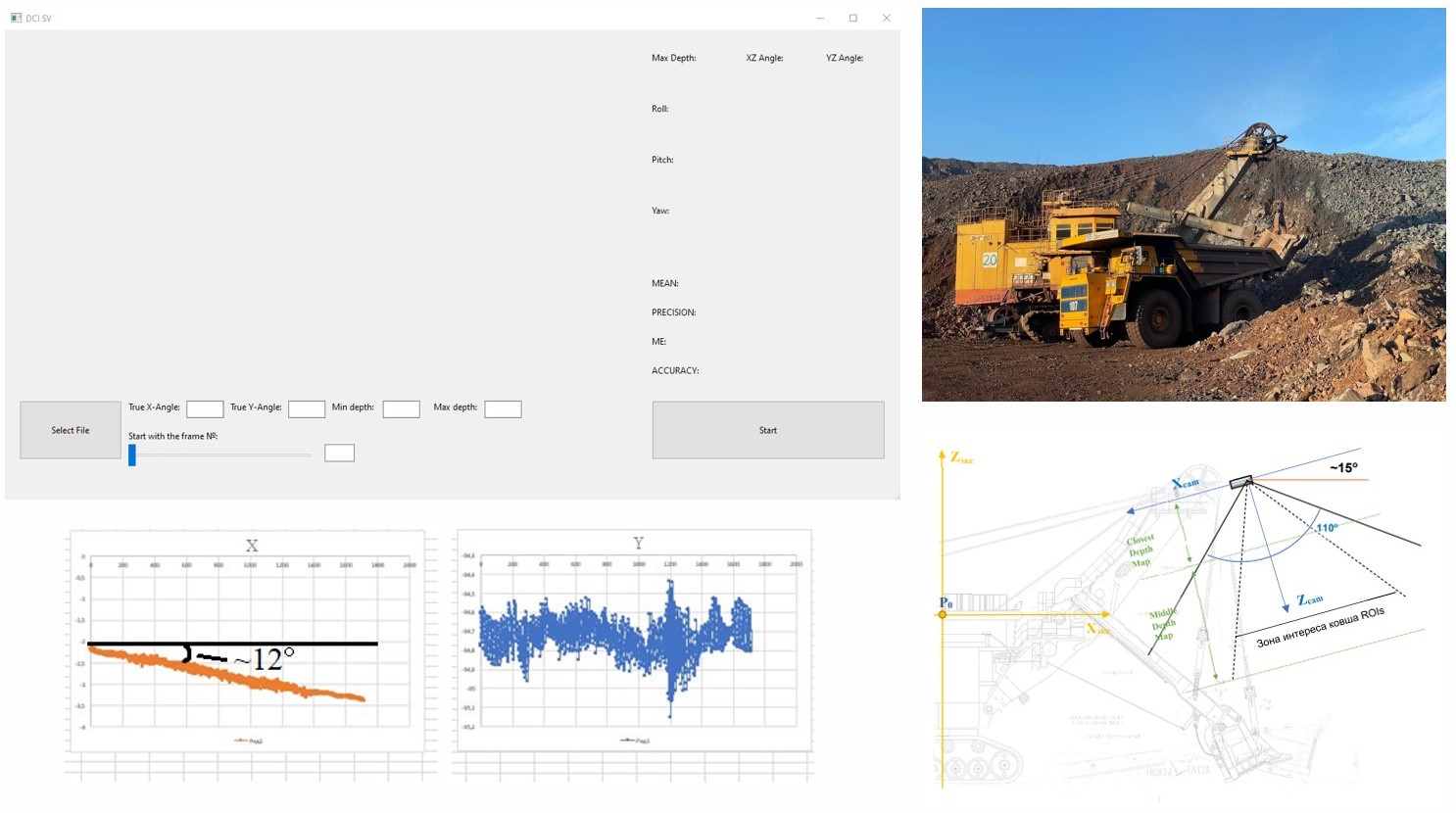
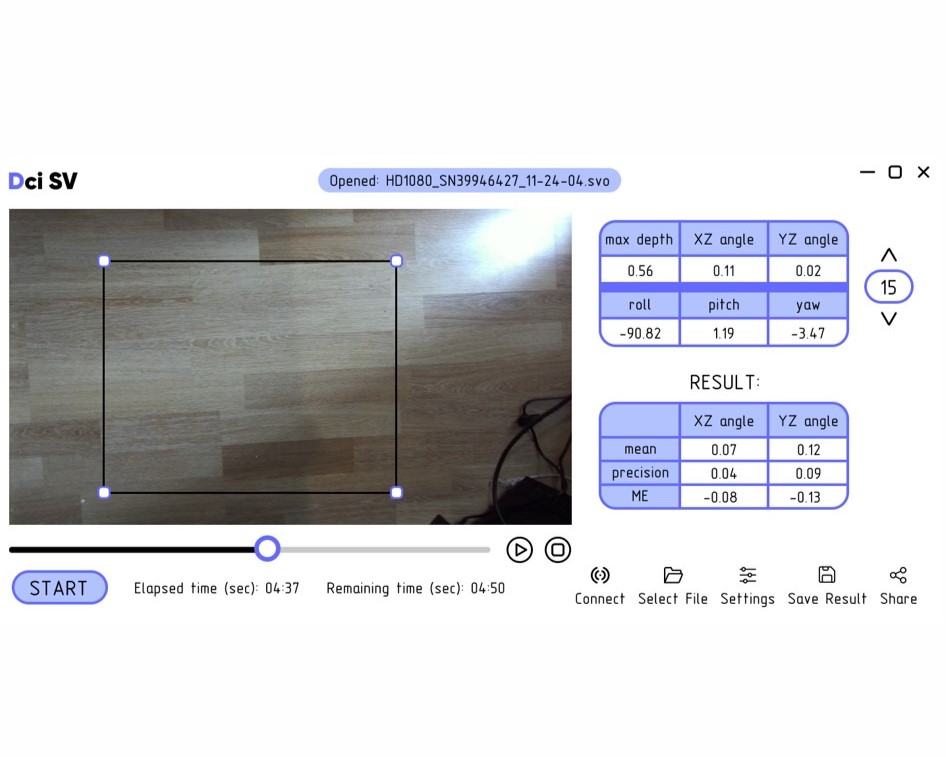
Для выполнения поставленных задач использовалась цифровая серийная стереокамера ZED2i от компании Stereolabs. Для подключения камеры к вычислительному устройству и получения с нее данных - программный пакет инструментов ZED SDK. Программа написана на языке C++, использовался дополнительный инструментарий для работы с компьютерным зрением: драйверы NVIDIA CUDA, открытая библиотека OpenCV. Фреймворк Qt позволил создать удобный пользовательский интерфейс, а также обеспечить кроссплатформенность.
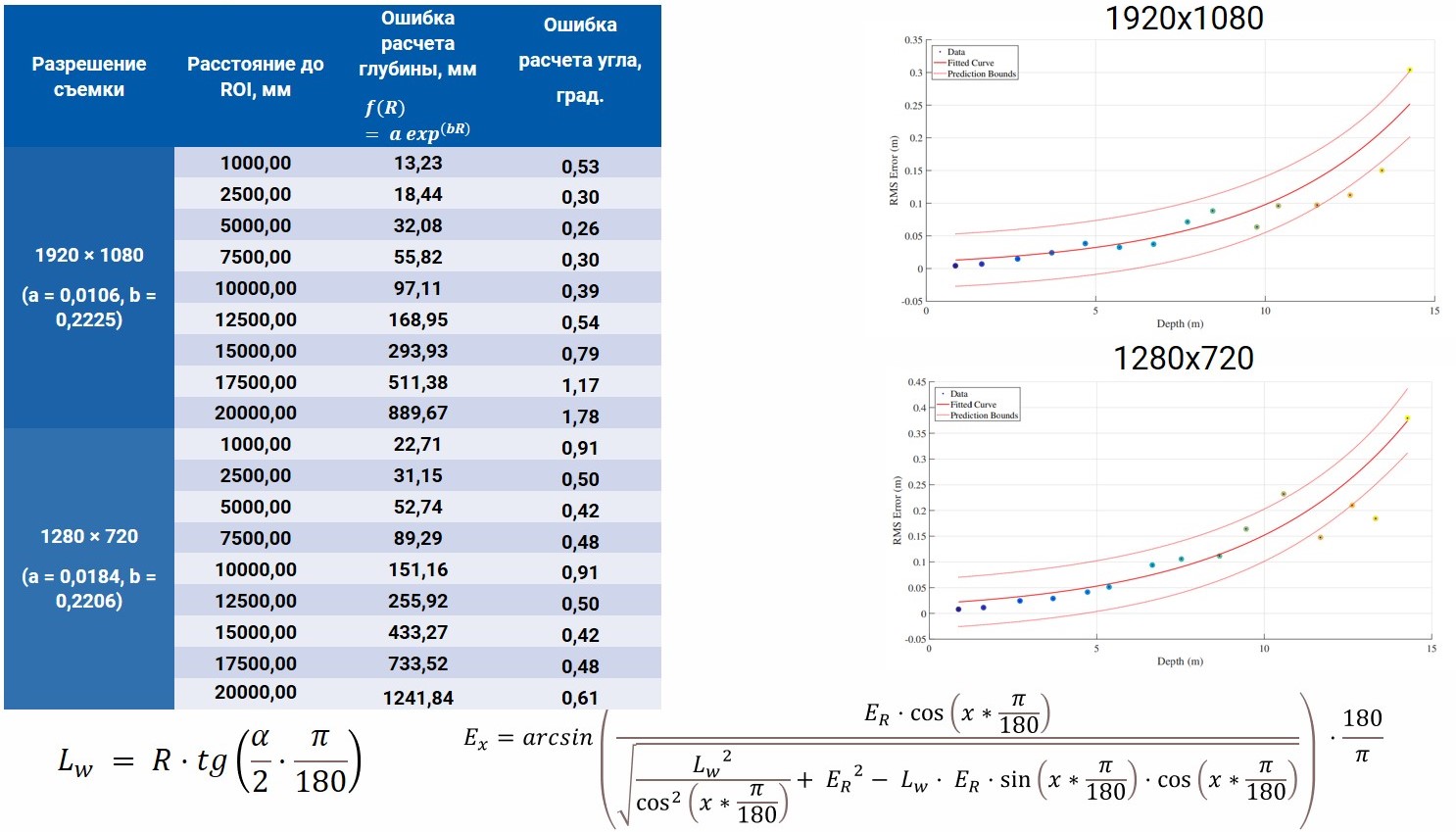
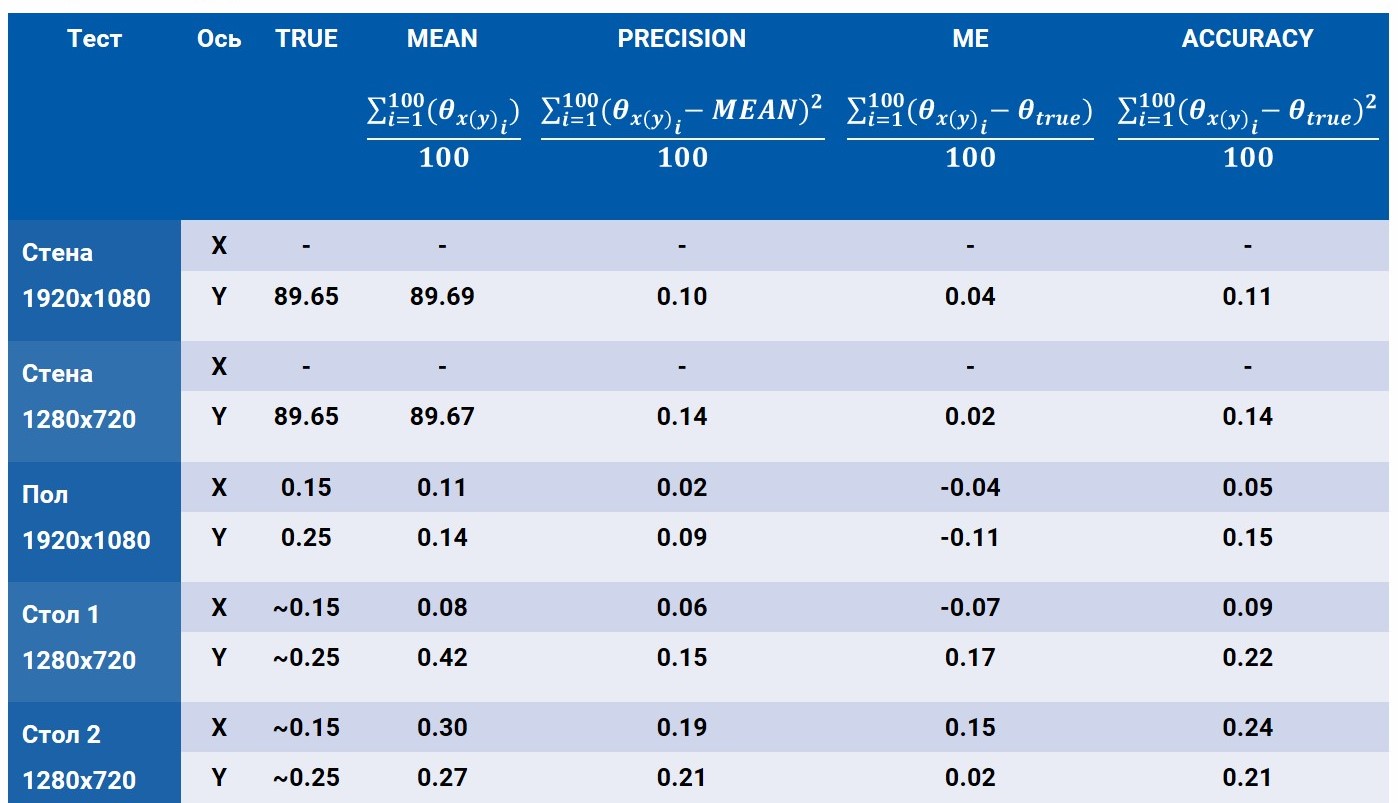
Результаты: было произведено тестирование разработанного алгоритма измерения углов наклона объекта в пяти разных сценах. Для проверки точности измерения производились для 100 кадров каждой сцены, а также были рассчитаны специальные метрики, показывающие погрешность на каждом кадре. Во всех случаях полученные средние значения по всей выборке кадров совпадали или были близки к истинным значениям, полученным с помощью настоящего электрического контактного инклинометра. Однако другие метрики показали разный уровень погрешности в разных сценах (обладающих разным уровнем освещения, положением камеры, наполненностью сцены и другими внешними факторами) - на данный момент алгоритм не обладает стопроцентной стабильностью и требует дальнейшей доработки для использования в настоящих задачах.